Crawler ekskawator operatory şahsy okuw simulýatory









Crawler ekskawator simulýatory iň soňky gözleg ekskawator sürüjisiniň okuw meýilnamasyna laýyk gelýär we iň täze "gözleg ekskawator simulýasiýa ulgamy" bilen enjamlaşdyrylýar. Simulýator sürüjiniň iş ukyplaryny we howpsuzlygyny ýokarlandyrmak üçin gözleg ekskawatoryny ulanmak üçin ýarym fiziki simulýasiýa ulgamyny ulanýar.

Gözlegçi ekskawator simulýasiýa tälimçisi, simulirlenen operasiýa konsolyny, rul hereketlendirijisini, gazma, tormoz, debriya and we beýleki dolandyryş iş böleklerini kabul edýär.
Simulýasiýa öwrediş programma üpjünçiligi hünärment kollejleriniň we okuw jaýlarynyň bilim we baha beriş zerurlyklaryny, şeýle hem okuw we okuw zerurlyklaryny kanagatlandyryp biljek “Okuw tertibi”, “Synag rejimi” we “Oýun tertibi” üç sany funksional moduldan durýar. birinji hatar önümçilik operatorlary.
Şeýle hem, gözleg ekskawator operatorlarynyň orta we ýokary derejeli işgärleri we zähmet hünär hünärlerini bahalandyrmak bölümlerinde işleýän işgärler üçin amatlydyr.Işçileriň we tehnikleriň başarnyklaryny bahalandyrmak we baha bermek zerurlyklary.

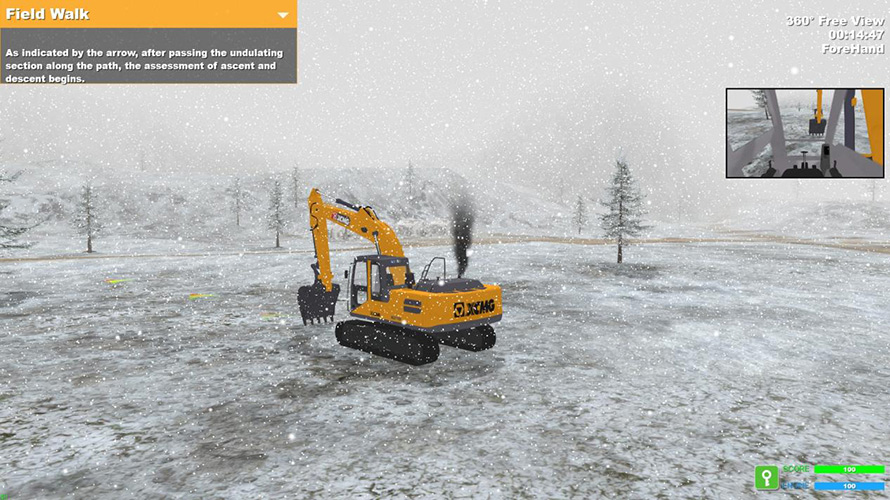
Erkin hereket, şäher ýoly, meýdan gezelenji, gazmak we zyňmak we ş.m. şäher ýol gurluşykçylarynyň turba liniýasyny sürmek we sürmek we gurmak ýaly köp okuw usuly bar.
Aýratynlyklary
Operasiýa we ulanyjy üçin amatly dizaýn ýaly durmuş
Enjamlar hakyky enjamy işledeniňizdäki ýaly duýgy döredip biler ýaly, hakyky maşynyň şol bir işleýiş mehanizmini kabul edýär.Saklanan programma üpjünçiliginde metal şöhlelendiriji effektleri, kölege effektlerini, fiziki täsirleri we beýleki aýratyn effektleri simulirlemek üçin programmalar bar.
Giňeldilen howpsuzlyk
Okuw döwründe hiç hili betbagtçylyk we töwekgelçilik enjamy, adamlary, hakyky maşynlary ulanyp, şol meýdan okuw programmalarynda köplenç görüp boljak öwrediş we häsiýetlere howp salmaz.
Çeýeligi meýilleşdiriň
Gije-gündiz bolsun, bulutly ýa-da ýagyşly bolsun, okuwy isleýşiňiz ýaly tertipläp bolýar we şowsuzlyk ýa-da erbet howa sebäpli okuwyň ýatyrylmagyndan gorkmaň.
Enjamyň kyn meselelerini çözüň
Häzirki wagtda köp sanly gurluşyk maşynlaryny öwretmek sapaklary, maşynlaryň ýoklugy sebäpli bortda ýeterlik sagatlap bilmeýän köp sanly okuwçy bilen doldurylýar. Simulýator, elbetde, animasiýa gurşawynda goşmaça tejribe serişdeleri bermek arkaly bu meseläni çözýär.
Energiýany tygşytlamak Pes uglerod we daşky gurşawa arassa
Bu simulýator diňe bir okuw hilini gowulaşdyrmak bilen çäklenmän, hakyky enjamda sarp edilýän wagty hem azaldar.Häzirki wagtda ýangyjyň bahasy ýokarlanýar.Şeýle-de bolsa, mekdebiň okuw çykdajylary ep-esli tygşytlanar ýaly, her okuw sagady üçin bary-ýogy 50 hytaý senti bar.
Arza
Ekskawator simulýatorlary, köp sanly global iş maşyn öndürijileri üçin öz enjamlary üçin simulýator çözgütlerini taslamak we durmuşa geçirmek üçin ulanylýar;
“Excavator Simulator” gazuw-agtaryş we logistika ugurlaryndaky mekdepler üçin indiki nesil iş maşynlaryny taýýarlamak çözgütlerini hödürleýär.

Tehniki öndürijilik görkezijisi
1. Iş naprýa .eniýesi: 220V ± 10%, 50Hz
2. Daşky gurşawyň temperaturasy: -20 ℃ ~ 50 ℃
3. Otnositel çyglylyk: 35% ~ 79%
4. Agyrlyk agramy:> 200Kg
5. Dil: Iňlis ýa-da özleşdirilen
6. Simulýatorlar VR, 3 ekran, 3 DOF we Mugallymlary dolandyrmak platformasy ýa-da başga ýöriteleşdirilen hyzmat bilen enjamlaşdyrylyp bilner.
Bukja

Zawodymyz






